

中国科学技术大学成功研发出具有19自由度仿生灵巧手,这一创新成果标志着智能机器人的新篇章已经开启。这种高度仿真的灵巧手具备高度自主性和适应性,能够模拟人类手指的精细动作,极大提升了机器人在复杂环境下的操作能力和智能水平。该技术的研发对于智能机器人的未来发展具有重要意义。
本文目录导读:
随着科技的飞速发展,智能机器人技术已成为全球科研领域的热点,在智能机器人的研发过程中,仿生灵巧手的设计与制造占据着举足轻重的地位,中国科学技术大学(简称中国科大)成功研发出一种具有19自由度仿生灵巧手,标志着我国在智能机器人领域取得了重要突破,本文将详细介绍这一研发成果及其对未来智能机器人技术的影响。
背景知识
灵巧手是智能机器人的重要组成部分,其设计灵感来源于人类手部结构,一个优秀的灵巧手需要具备高度的自主性、灵活性和精确性,以便完成各种复杂的任务,随着材料科学、传感器技术和人工智能等领域的不断进步,仿生灵巧手的设计越来越精细,功能越来越强大。
中国科大研发成果介绍
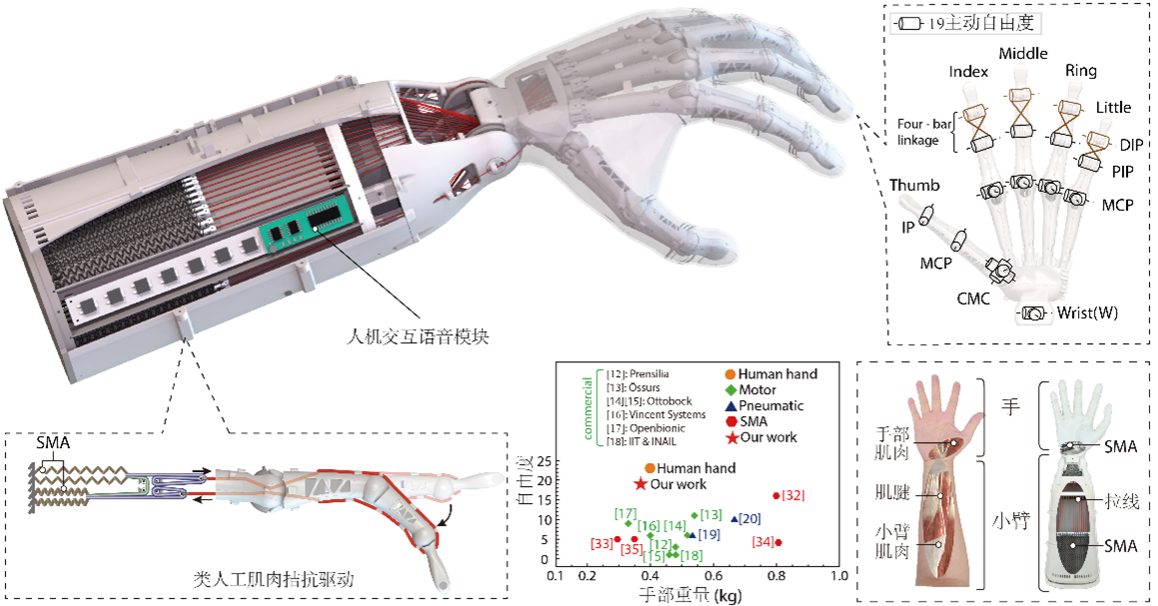
中国科大此次研发的仿生灵巧手具备19个自由度,这一设计极大地提高了灵巧手的灵活性和精确性,该灵巧手的每个关节都可以独立运动,使得手部可以完成更加精细的动作,该灵巧手还配备了先进的传感器和控制系统,能够实现高度自主化和智能化操作。

这一研发成果的实现离不开中国科大科研团队的不懈努力,他们采用了先进的材料科学和制造技术,结合人工智能算法,成功开发出这一具有高度自主性和智能性的灵巧手,这一成果不仅为我国智能机器人领域的发展做出了重要贡献,也为全球智能机器人技术的发展提供了新的思路和方法。
技术特点分析
1、高度自主性:该灵巧手具备先进的控制系统和算法,可以在没有外部干预的情况下自主完成任务。
2、灵活性:具备19个自由度的设计使得该灵巧手可以完成各种复杂的动作,如抓取、操作等。
3、精确性:配备先进的传感器,能够实现精确的力感知和位置感知,从而提高操作的精确性。
4、耐用性:采用高性能的材料和制造工艺,保证了灵巧手的耐用性。
5、智能化:结合人工智能算法,使得该灵巧手具备学习和优化能力,能够不断提高操作效率和准确性。
应用领域探讨
具有19自由度仿生灵巧手的应用领域非常广泛,在工业生产线上,该灵巧手可以替代人工完成各种复杂和危险的操作,提高生产效率和质量,在医疗领域,该灵巧手可以应用于精细手术操作、康复训练等领域,在航空航天、救援等领域也有广泛的应用前景。
对未来智能机器人技术的影响
中国科大研发的19自由度仿生灵巧手对未来智能机器人技术将产生深远影响,这一成果将推动智能机器人在各个领域的应用拓展,提高生产效率和生活质量,这一成果将促进相关领域的科技发展,如材料科学、传感器技术、人工智能等,这一成果的推广和应用也将促进智能机器人的产业化和市场化。
中国科大成功研发出具有19自由度仿生灵巧手,这一成果标志着我国在智能机器人领域取得了重要突破,该灵巧手具备高度自主性、灵活性、精确性和耐用性等特点,广泛应用于工业生产、医疗、航空航天、救援等领域,这一成果将推动未来智能机器人技术的发展和应用,为我国的科技产业和社会发展做出重要贡献。
 京ICP备11000001号
京ICP备11000001号